มือเทียมสั่งด้วยไฟฟ้ากล้ามเนื้อต้นแขนเพื่อผู้พิการ ฝีมือนักประดิษฐ์สาว มจธ.
วันพฤหัส ที่ 15 สิงหาคม พ.ศ. 2567
การดู : 842

แชร์ :
นักประดิษฐ์จาก มจธ. เผยโฉมหุ่นยนต์ต้นแบบมือเทียมสำหรับผู้พิการแขนขาดใต้ข้อศอก ดึงสัญญาณไฟฟ้าจากแขนที่เหลือมาใช้ หยิบจับขวดน้ำได้ คาดใช้งานจริงใน 8 เดือน เอกชนสนใจผลิต ผลงานคว้ารางวัลใหญ่ Grand Prize จาก Japan Design, Idea and Invention Expo (JDIE2024) เหรียญทองจาก วช.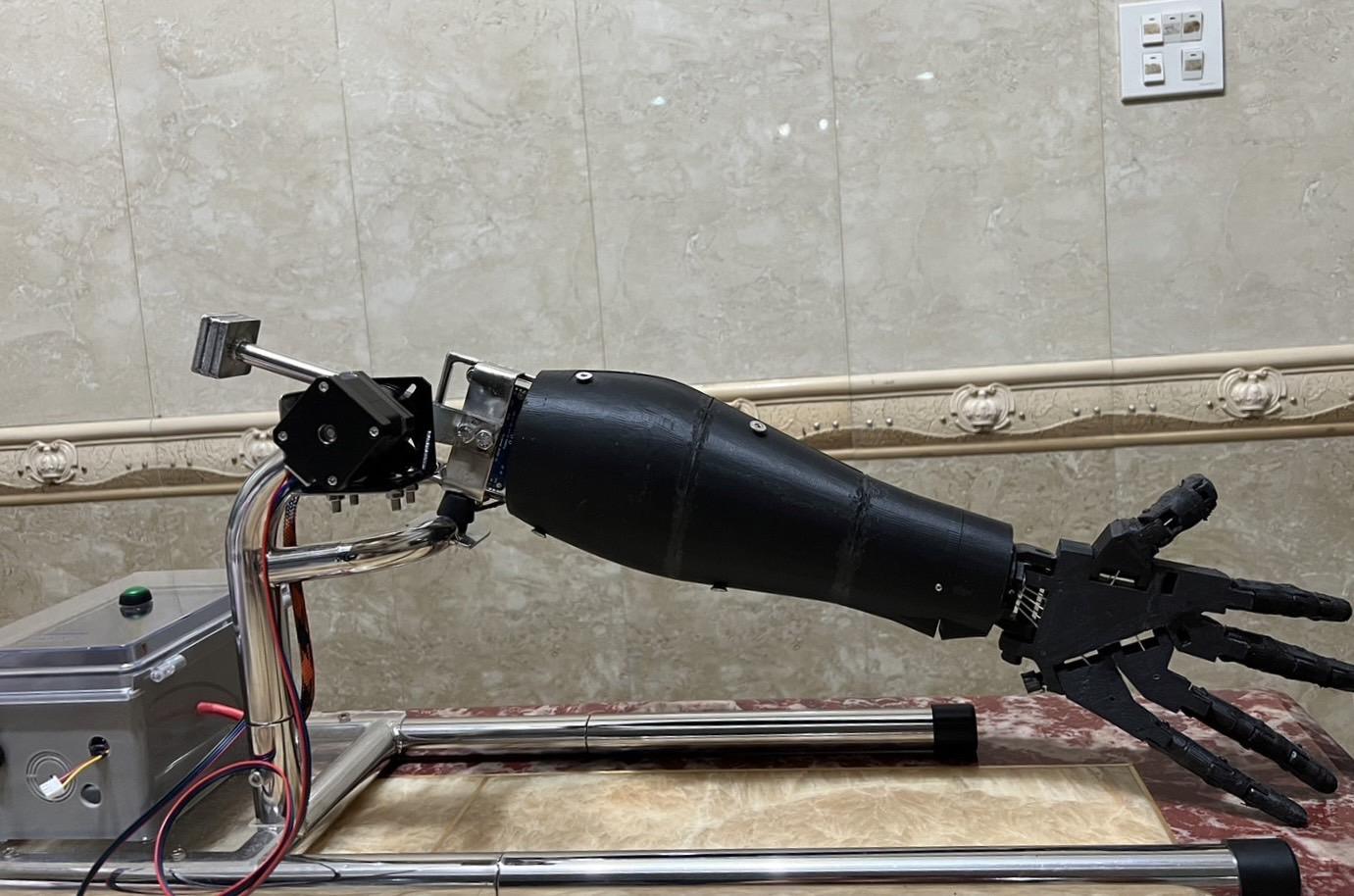

ดร.ฐิตาภรณ์ กนกรัตน อาจารย์ภาควิชาคณิตศาสตร์ คณะวิทยาศาสตร์ มหาวิทยาลัยเทคโนโลยีพระจอมเกล้าธนบุรี (มจธ.) เปิดเผยถึงผลงานหุ่นยนต์ต้นแบบมือเทียมกลสวมแขนสำหรับผู้พิการแขนขาดใต้ข้อศอก โดยใช้สัญญาณอิเล็กโทรไมโอแกรม (Electromyography, EMG) และเทคนิคปัญญาประดิษฐ์ (AI) ว่าพัฒนาขึ้นเพื่อช่วยผู้พิการแขนขาดใต้ข้อศอก โดยท่อนแขนส่วนบนยังคงอยู่ ผลงานนี้ได้รับรางวัลชนะเลิศสูงสุด Grand Prize จากงานประกวดสิ่งประดิษฐ์และนวัตกรรมนานาชาติญี่ปุ่น Japan Design, Idea and Invention Expo (JDIE2024) และเหรียญทองจากสำนักงานการวิจัยแห่งชาติ (วช.)


ดร.ฐิตาภรณ์ กล่าวถึงการพัฒนาหุ่นยนต์มือเทียมว่า ประกอบด้วยองค์ความรู้หลายด้าน เช่น อินเทอร์เน็ตของสรรพสิ่ง (Internet of Things, IoT), การเรียนรู้ของเครื่อง (Machine Learning), และปัญญาประดิษฐ์ (AI) “เราเก็บสัญญาณไฟฟ้ากล้ามเนื้อ (EMG) โดยวางเซ็นเซอร์ EMG บนแขนเพื่อดึงสัญญาณออกมาและประมวลผลเพื่อแปลงสัญญาณและสร้างโมเดลการเรียนรู้”

เจ้าของผลงานหุ่นยนต์มือกล ขยายความว่า ในร่างกายของคนเรามีสัญญาณไฟฟ้า (Electrical Signal) ที่สามารถเก็บได้จากกล้ามเนื้อ สัญญาณไฟฟ้าเหล่านี้ เกิดจากการขยับอวัยวะหรือการแสดงท่าทาง ซึ่งทำให้กล้ามเนื้อทำงานและผลิตสัญญาณไฟฟ้าออกมา เซ็นเซอร์ที่ออกแบบมาโดยเฉพาะสามารถดึงสัญญาณไฟฟ้านี้ได้ แม้ว่าแขนใต้ข้อศอกจะขาดไป แต่แขนส่วนที่เหลือยังส่งสัญญาณไฟฟ้าไปยังมือเทียมได้ เช่น เมื่อคิดที่จะหยิบจับสิ่งของ สมองจะสั่งการไปยังกล้ามเนื้อให้เคลื่อนไหว ซึ่งจะส่งสัญญาณไฟฟ้าออกไป หากไม่มีแขนและมือ ระบบรับส่งสัญญาณก็สามารถใช้อุปกรณ์รับสัญญาณที่ติดตั้งไว้คล้ายการวัดคลื่นหัวใจได้
สำหรับความคืบหน้าของหุ่นยนต์มือกล ดร.ฐิตาภรณ์ กล่าวว่า ขณะนี้หุ่นยนต์สามารถกำมือ หมุนข้อมือ และหยิบจับวัตถุที่มีขนาดพอเหมาะกับแขนเทียม เช่น ถ้วยกาแฟหรือขวดแอลกอฮอล์ขนาดเล็ก ความท้าทายต่อไปคือการพัฒนาให้หุ่นยนต์มือกลสามารถแสดงท่าทางของนิ้ว เช่น ชูนิ้วหนึ่งนิ้วหรือสองนิ้วได้ เพื่อให้สมจริงมากขึ้น การพัฒนานี้ขึ้นอยู่กับการเก็บสัญญาณไฟฟ้าที่เพียงพอและแม่นยำ เช่น ท่ากำมือที่ต้องเก็บสัญญาณหลายครั้งเพื่อให้สัญญาณตรงกัน และต้องตรวจสอบว่ามีสิ่งรบกวนหรือไม่ การใช้งานจะเริ่มจากการหยิบจับทั่วไป และสามารถพัฒนาให้ละเอียดขึ้นตามความต้องการ
ดร.ฐิตาภรณ์ กล่าวถึงจุดเริ่มต้นของการพัฒนาหุ่นยนต์มือกลว่า เพื่อช่วยผู้พิการแขนขาดให้กลับมาใช้งานได้ใกล้เคียงกับแขนปกติ แม้ว่าจะเป็นงานวิจัยทางการแพทย์ แต่ก็มีกลุ่มเป้าหมายชัดเจน และมีผู้ใช้จริงเป็นแรงจูงใจให้พัฒนา เพราะท้ายที่สุดหุ่นยนต์มือกลนี้จะได้นำไปใช้งานจริง โดยได้ทดสอบกับผู้ใช้จริงผ่านความร่วมมือกับโรงพยาบาลผู้สูงอายุบางขุนเทียน ขณะนี้มีการตีพิมพ์ในวารสารวิชาการแล้ว ในเชิงวิชาการเรามองว่าหุ่นยนต์มือกลนี้สามารถพัฒนาให้สมบูรณ์มากขึ้นได้หลายฟังก์ชัน อาจกลายเป็นผลิตภัณฑ์ในอนาคต ขณะนี้มีการร่วมมือกับบริษัทเอกชนที่จะเผยแพร่ผลงานต่อไป
อย่างไรก็ตาม ดร.ฐิตาภรณ์ อธิบายว่า แม้หุ่นยนต์มือกลจะมีอยู่ในตลาดบ้างแล้ว แต่ผลงานของเราสามารถคัดแยกสัญญาณไฟฟ้าได้ถูกต้องและแม่นยำ ซึ่งเป็นสิ่งที่ท้าทาย จึงต้องออกแบบอัลกอริธึมของซอฟต์แวร์ให้ทำงานสัมพันธ์กับสัญญาณไฟฟ้า และทำให้จำแนกท่าทางได้ถูกต้องตามต้องการ ส่วนการออกสู่ตลาดจะต้องทดสอบเพิ่มเติมเพื่อป้องกันหรือแก้ไขข้อจำกัดเล็กๆ น้อยๆ ที่ยังหลงเหลืออยู่ และมั่นใจว่าเมื่อออกสู่ตลาดจะมีจุดเด่นที่แตกต่างจากผลิตภัณฑ์ทั่วไป คาดว่าจะใช้เวลาอีก 6-8 เดือนในการพัฒนาซอฟต์แวร์เพิ่มเติม หลังจากนั้นหากมีความต้องการเพิ่มเติมอาจพัฒนาต่ออีก 1 ปีเพื่อนำไปใช้งานจริง
ข่าวอัพเดท

อนันต์ นิลมานนท์ นายก สนท. มอบหนังสือแต่งตั้ง “ดร.ชัชวาล เผ่าสวัสดิ์” เป็นที่ปรึกษาสมาคมฯ พร้อมให้สัมภาษณ์ทิศทางการพัฒนาสมาคมในวาระ 3 ปี
วันเสาร์ ที่ 20 มิถุนายน พ.ศ. 2569

SCG จับมือ TU เดินหน้ายกระดับ “Possibilities Space for Young Talent Program 2026” สร้างผู้นำรุ่นใหม่ เหลาไอเดียแก้โจทย์ธุรกิจ
วันศุกร์ ที่ 19 มิถุนายน พ.ศ. 2569

"ประธานกรรมการมูลนิธิป่อเต็กตึ๊ง" มอบผู้แทนร่วมแสดงความยินดี "นายกสมาคมหนังสือพิมพ์แห่งประเทศไทยฯ" คนใหม่
วันศุกร์ ที่ 19 มิถุนายน พ.ศ. 2569

นายก สนท. มอบหนังสือแต่งตั้งที่ปรึกษาสมาคม แด่ "ดร.สุวัฒน์ ทองธนากุล" นักหนังสือพิมพ์อาวุโส
วันศุกร์ ที่ 19 มิถุนายน พ.ศ. 2569
สมาพันธ์สื่อมวลชนไทยฯ ไปร่วมฉลอง 101 ปี วันสื่อมวลชนปฏิวัติเวียดนาม
วันพฤหัส ที่ 18 มิถุนายน พ.ศ. 2569

เอส แอนด์ พี รับมอบประกาศนียบัตร "ฉลากคาร์บอนฟุตพริ้นท์องค์กร ประจำปี 2568" ขับเคลื่อนธุรกิจอาหารและเบเกอรี่คาร์บอนต่ำ
วันพุธ ที่ 17 มิถุนายน พ.ศ. 2569

อีสท์ วอเตอร์ ลงนาม MOU พัฒนาอ่างเก็บน้ำดิบทับมา จ.ระยอง
วันพุธ ที่ 17 มิถุนายน พ.ศ. 2569

ข่าวที่เกี่ยวข้อง
SCG จับมือ TU เดินหน้ายกระดับ “Possibilities Space for Young Talent Program 2026” สร้างผู้นำรุ่นใหม่ เหลาไอเดียแก้โจทย์ธุรกิจ"
วันศุกร์ ที่ 19 มิถุนายน พ.ศ. 2569
สมาพันธ์สื่อมวลชนไทยฯ ไปร่วมฉลอง 101 ปี วันสื่อมวลชนปฏิวัติเวียดนาม"
วันพฤหัส ที่ 18 มิถุนายน พ.ศ. 2569
เอส แอนด์ พี รับมอบประกาศนียบัตร "ฉลากคาร์บอนฟุตพริ้นท์องค์กร ประจำปี 2568" ขับเคลื่อนธุรกิจอาหารและเบเกอรี่คาร์บอนต่ำ"
วันพุธ ที่ 17 มิถุนายน พ.ศ. 2569